
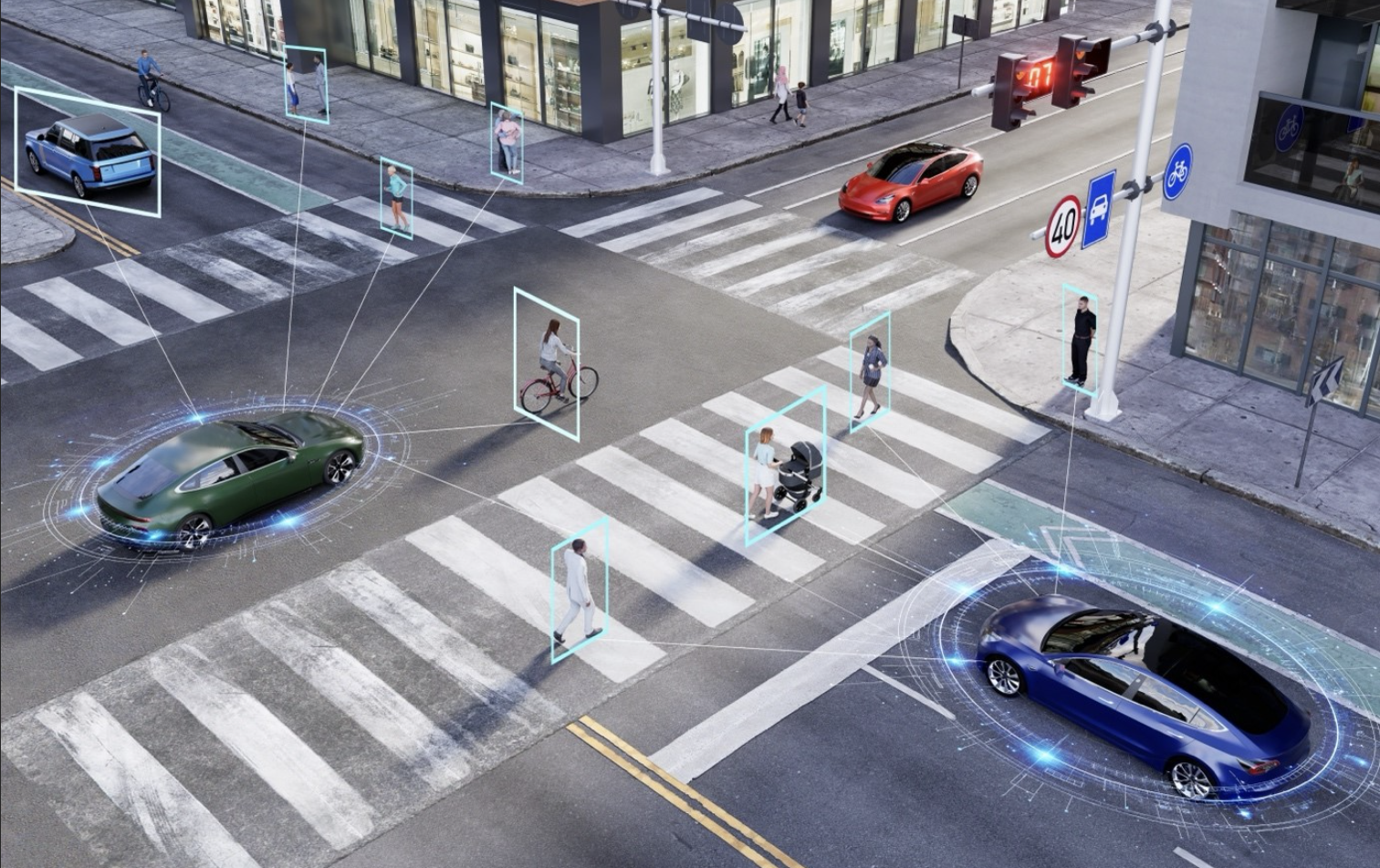
Autonomous systems can perceive their surroundings today with remarkable precision. Cameras identify objects, radar measures distances, and LiDAR creates highly detailed environmental models. The vehicle’s perception appears comprehensive and reliable.
Yet one fundamental question often remains unanswered: How reliable is the foundation on which this perception is built?
Many decisions made by autonomous systems depend on data whose quality is not immediately visible. This is especially true for positioning, timing, and communication data. These information layers form the basis of almost every autonomous function while often being taken for granted.
This challenge becomes particularly evident in satellite-based navigation. Global Navigation Satellite Systems (GNSS) provide what appears to be highly accurate positioning information. In reality, however, GNSS performance can be affected by numerous external factors.
Urban canyons, signal reflections (multipatheffects), atmospheric delays, signal obstructions, and intentional interferencesuch as jamming or spoofing can significantly degrade positioning accuracy. These disruptions are not always immediately detectable by the system. Their consequences for autonomous decision-making, however, can be substantial.
The growing importance of this issue is increasingly recognized at both industry and policy levels. Reliable and resilient Positioning, Navigation, and Timing (PNT) services are now considered critical infrastructure for the future of automated and autonomous mobility.
At the same time, it has become clear that existing systems do not yet fully meet the requirements of safety-critical applications in terms of availability, integrity, and resilience. As autonomous technologies continue to evolve, ensuring trustworthy PNT data will become just as important as advancing sensor technology itself.
This perspective is also reflected in the latest position paper from the German Association of the Automotive Industry (VDA) on Low Earth Orbit Positioning, Navigation, and Timing (LEO-PNT). The paper highlights the need for robust, validated, and safety-critical PNT services to support next-generation mobility solutions.

DiMOS actively contributes to the VDA LEO-PNT working group, helping to address these challenges and support the development of resilient positioning infrastructures for future autonomous systems.
Autonomy is not achieved through sensors alone. It requires confidence in the data that informs every decision. As autonomousmobility moves closer to large-scale deployment, the quality, integrity, and resilience of positioning and timing data will become a defining factor for safety, reliability, and public trust.
This leads to a fundamental insight: autonomous systems do not necessarily fail due to missing sensor capabilities, but due to uncertainty in their underlying data foundation.
In space applications, dealing with this kind of uncertainty has been standard practice for decades. There, it is never assumed that signals are continuously correct or complete. Instead, their quality is continuously monitored, evaluated, and incorporated into decision-making processes. Deviations are detected early and systematically interpreted. Safety does not emerge from the assumption of perfect data, but from the ability to operate with incomplete and uncertain information.
For autonomous systems in civil applications, this leads to a clear conclusion: autonomy does not reside within the vehicle alone. It emerges from the interaction between onboard sensing, external infrastructure, and the continuous assessment of underlying data quality.
This is precisely where DiMOS focuses its work.
Building on expertise from space applications, DiMOS develops infrastructure solutions designed to address this critical gap. Through the deployment of roadside units, continuous monitoring of positioning, timing, and communication signals, and the analysis of local environmental influences, the quality of underlying data is made transparent.
The objective is not only to provide data, butto make its reliability assessable. This includes methods for early detectionof signal disturbances, classification of deviations, and the provision of safety-relevant information for autonomous system operations. In the future, such data can serve as a qualified external information source within safety-critical system architectures.
Intelligent infrastructure along the road thustakes on a new role. It extends the system’s perspective beyond the boundariesof the vehicle. It enables independent assessment of signal quality, detects disturbances at an early stage, and provides additional contextual information.
In this way, uncertainty is not eliminated but made visible—and therefore manageable.
Safety therefore does not start at the point where a system makes a decision. It begins with the quality of the reality on which that decision is based.