Autonomie braucht mehr als Sensoren: Warum Datenqualität über Sicherheit entscheidet
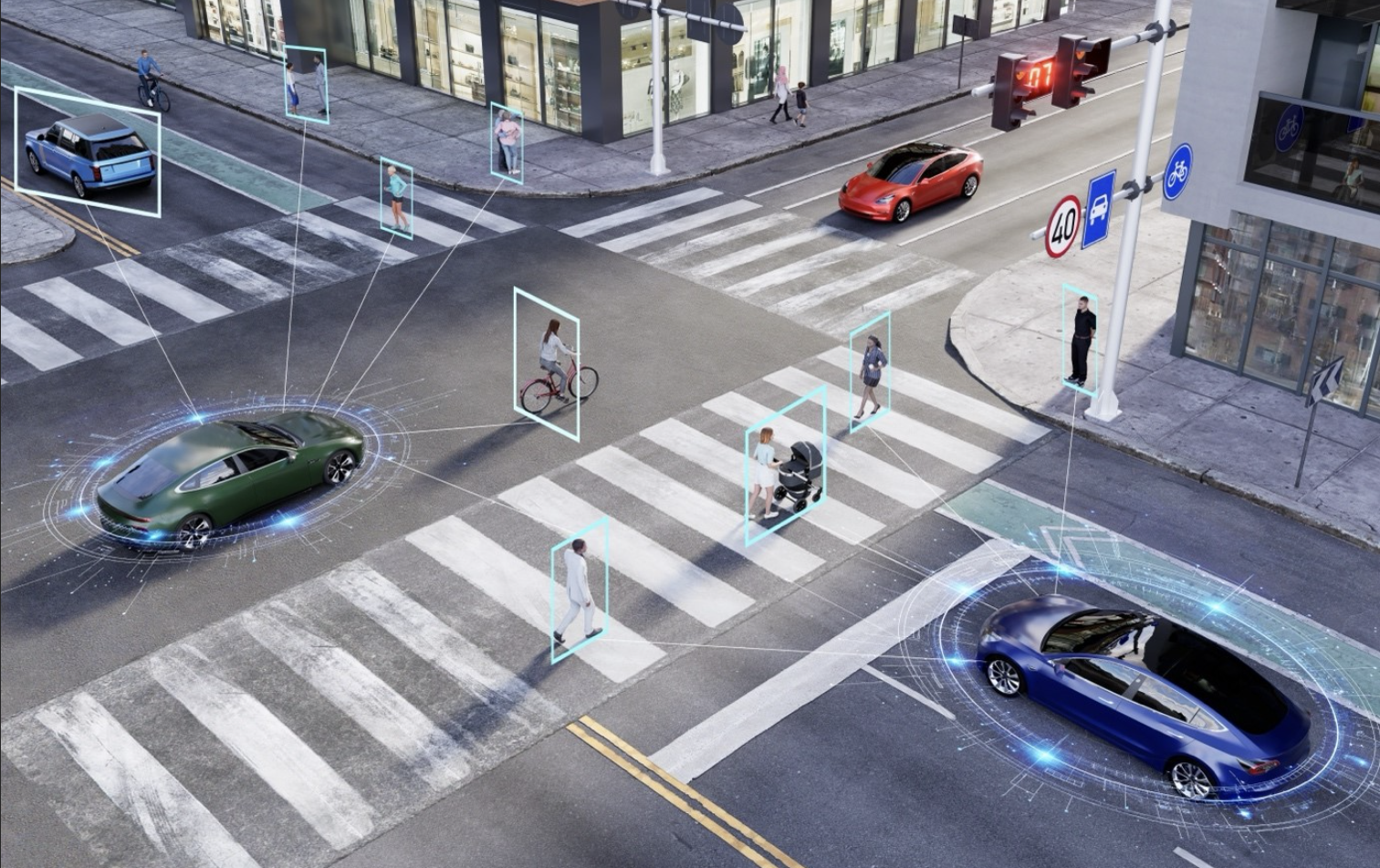
Autonome Systeme erfassen ihre Umgebung heute mit beeindruckender Präzision. Kameras erkennen Objekte, Radar misst Abstände und Lidar erzeugt hochdetaillierte Umgebungsmodelle. Die Wahrnehmung des Fahrzeugs wirkt umfassend und zuverlässig.
Doch eine zentrale Frage bleibt häufig unbeantwortet: Wie verlässlich ist die Grundlage, auf der diese Wahrnehmung basiert?
Viele Entscheidungen autonomer Systeme beruhen auf Daten, deren Qualität nicht unmittelbar sichtbar ist. Besonders betrifft dies Positions-, Zeit- und Kommunikationsdaten. Diese Informationsschichten bilden die Grundlage nahezu jeder autonomen Funktion und werden dennoch häufig als selbstverständlich vorausgesetzt.
Die verborgene Abhängigkeit von Positionsdaten
Gerade bei satellitengestützter Navigation wird diese Herausforderung besonders deutlich. Globale Navigationssatellitensysteme (GNSS) liefern scheinbar hochpräzise Positionsinformationen. In der Realität kann ihre Leistungsfähigkeit jedoch durch zahlreiche externe Faktoren beeinflusst werden.
Städtische Häuserschluchten, Signalreflexionen (Mehrwegeffekte), atmosphärische Verzögerungen, Abschattungen sowie gezielte Störungen wie Jamming oder Spoofing können die Genauigkeit der Positionsdaten erheblich reduzieren. Diese Beeinträchtigungen sind für das System nicht immer unmittelbar erkennbar. Ihre Auswirkungen auf autonome Entscheidungen können jedoch erheblich sein.
PNT als kritische Infrastruktur
Die zunehmende Bedeutung dieser Herausforderung wird auch auf Industrie- und politischer Ebene erkannt. Zuverlässige und widerstandsfähige Positionierungs-, Navigations- und Zeitdienste (PNT) gelten als kritische Infrastruktur für die Zukunft automatisierter und autonomer Mobilität.
Gleichzeitig zeigt sich, dass bestehende Systeme hinsichtlich Verfügbarkeit, Integrität und Resilienz noch nicht vollständig den Anforderungen sicherheitskritischer Anwendungen entsprechen. Mit der Weiterentwicklung autonomer Technologien wird die Vertrauenswürdigkeit von PNT-Daten ebenso entscheidend werden wie der Fortschritt bei Sensorik und Fahrzeugtechnologien.
Die Rolle von LEO-PNT für die Mobilität der Zukunft
Diese Perspektive spiegelt sich auch im aktuellen Positionspapier des Verbands der Automobilindustrie (VDA) zu Low Earth Orbit Positioning, Navigation and Timing (LEO-PNT) wider. Das Papier hebt die Notwendigkeit robuster, validierter und sicherheitskritischer PNT-Dienste für zukünftige Mobilitätslösungen hervor.
DiMOS wirkt aktiv in der VDA LEO-PNT Projektgruppe an diesen Fragestellungen mit.
DiMOS arbeitet aktiv in der VDA LEO-PNT Projektgruppe mit und bringt Erfahrungen aus der Entwicklung resilienter Positionierungsinfrastrukturen für zukünftige autonome Systeme ein.
Vertrauen beginnt mit Daten
Autonomie entsteht nicht allein durch Sensoren. Sie erfordert Vertrauen in die Daten, die jede Entscheidung eines Systems beeinflussen. Mit der zunehmenden Verbreitung autonomer Mobilität werden Qualität, Integrität und Resilienz von Positions- und Zeitdaten zu entscheidenden Faktoren für Sicherheit, Zuverlässigkeit und gesellschaftliche Akzeptanz.
Von Datenunsicherheit zu Systemresilienz
Daraus ergibt sich eine grundlegende Erkenntnis: Autonome Systeme scheitern nicht zwangsläufig an fehlender Sensorik, sondern an der Unsicherheit ihrer zugrunde liegenden Datenbasis.
In Raumfahrtanwendungen ist der Umgang mit dieser Art von Unsicherheit seit Jahrzehnten etabliert. Dort wird nicht angenommen, dass Signale jederzeit vollständig und fehlerfrei sind. Stattdessen wird ihre Qualität kontinuierlich überwacht, bewertet und in Entscheidungsprozesse einbezogen. Abweichungen werden frühzeitig erkannt und systematisch eingeordnet.
Sicherheit entsteht nicht durch die Annahme perfekter Daten, sondern durch die Fähigkeit, mit unvollständigen und unsicheren Informationen zuverlässig umzugehen.
Autonomie als Systemeigenschaft
Für autonome Systeme im zivilen Betrieb ergibt sich daraus eine klare Konsequenz: Autonomie entsteht nicht allein innerhalb des Fahrzeugs. Sie entwickelt sich aus dem Zusammenspiel von fahrzeuginterner Sensorik, externer Infrastruktur und der kontinuierlichen Bewertung der zugrunde liegenden Datenqualität.
Genau hier setzt DiMOS an.
Infrastruktur schafft Vertrauen in Daten
Auf Basis von Erfahrungen aus der Raumfahrt entwickelt DiMOS Infrastrukturlösungen, die diese kritische Lücke adressieren. Durch den Einsatz von Road Side Units, kontinuierliches Monitoring von Positions-, Zeit- und Kommunikationssignalen sowie die Analyse lokaler Einflussfaktoren wird die Qualität der zugrunde liegenden Daten transparent gemacht.
Ziel ist es nicht nur, Daten bereitzustellen, sondern ihre Verlässlichkeit bewertbar zu machen. Dazu gehören Verfahren zur frühzeitigen Erkennung von Signalstörungen, zur Klassifizierung von Abweichungen sowie zur Bereitstellung sicherheitsrelevanter Informationen für autonome Systemarchitekturen.
Perspektivisch können diese Informationen als qualifizierte externe Informationsquelle in sicherheitskritische Systeme integriert werden.
Eine neue Rolle für intelligente Straßeninfrastruktur
Die intelligente Infrastruktur entlang der Straße übernimmt damit eine neue Funktion. Sie erweitert die Perspektive des Systems über die Grenzen des Fahrzeugs hinaus. Sie ermöglicht eine unabhängige Bewertung der Signalqualität, erkennt Störungen frühzeitig und stellt zusätzliche Kontextinformationen bereit.
Unsicherheit wird dadurch nicht vollständig beseitigt – sie wird sichtbar und damit beherrschbar.
Sicherheit beginnt mit Datenqualität
Sicherheit beginnt daher nicht erst in dem Moment, in dem ein System eine Entscheidung trifft. Sie beginnt mit der Qualität der Realität, auf der diese Entscheidung basiert.